

H Volvo παρουσίασε μία ενδιαφέρουσα ιδέα με στόχο στην βελτιστοποίηση της ακρίβειας της αυτόνομης οδήγησης…
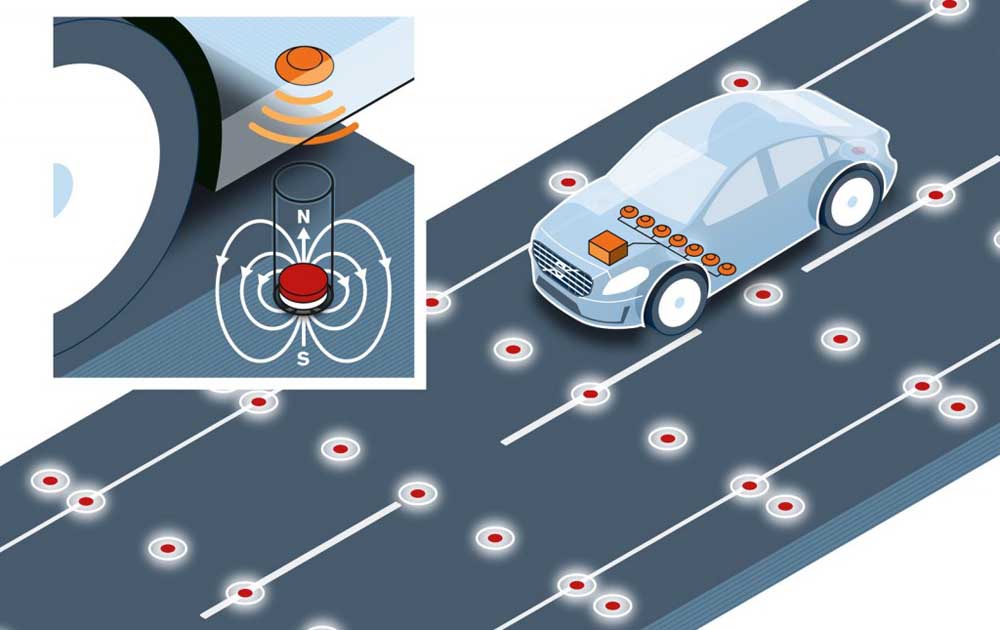
Στα περισσότερα συστήματα αυτόνομης οδήγησης η τηλεματική -και συγκεκριμένα το δορυφορικό σύστημα GPS– αποτελεί το βασικό στοιχείο της όλης πλατφόρμας σε συνδυασμό με ένα σύνολο από κάμερες και ραντάρ. Γιατί όμως η καθοδήγηση ενός αυτόνομου αυτοκινήτου να μην γίνεται κατευθείαν από το οδόστρωμα;
Το αυτόνομο όχημα είναι εφοδιασμένο με διάφορους αισθητήρες που «επικοινωνούν» με τα μαγνητάκια. Το όλο project «τρέχει» σε συνεργασία με το σουηδικό κράτος και σχεδιάστηκε με την λογική ενός φανταστικού σιδηρόδρομου όπου πάνω του τρέχει ένα όχημα. Βασικός του σκοπός είναι στο μέλλον η βελτιστοποίηση της ακρίβειας της αυτόνομης οδήγησης καθώς η ακρίβεια του GPS και της ομπρέλας από κάμερες και ραντάρ μετριάζεται υπό συγκεκριμένες περιβαλλοντικές συνθήκες (π.χ. ομίχλη, κακοκαιρία κ.λπ.).




-

-

-

-

-

-

